Precise Traffic Monitoring and Telemetry Streaming for Prediction and Analysis
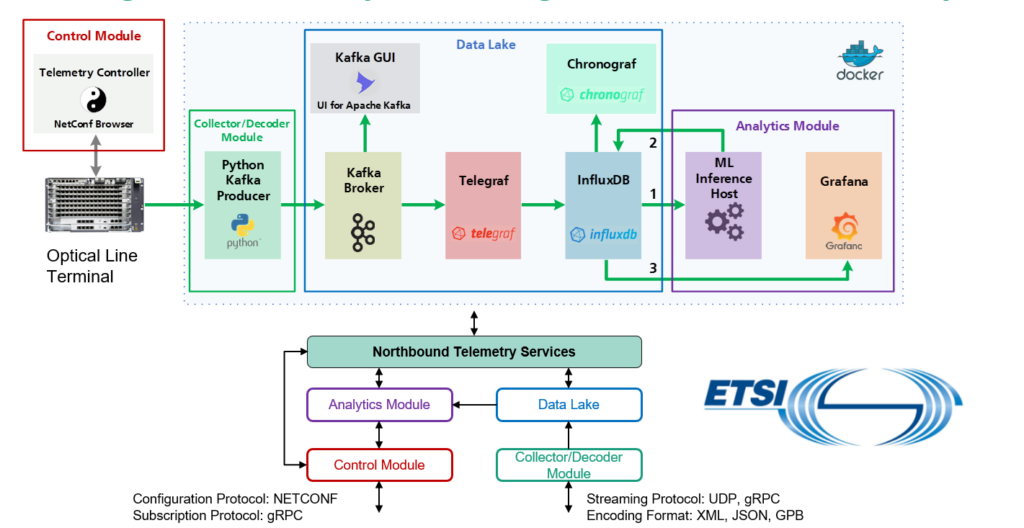
This PoC demonstrates enhanced traffic monitoring and fine granular telemetry streaming solutions for optical access networks. In other words, the PoC focuses on the use-case of traffic monitoring and data analytics and demonstrates a full Machine Learning (ML) pipeline comprising telemetry retrieval from data sources (i.e., Optical Line Terminal (OLT)), telemetry broker, real time write/read […]
Multi-Service PON Supporting Video Management Services
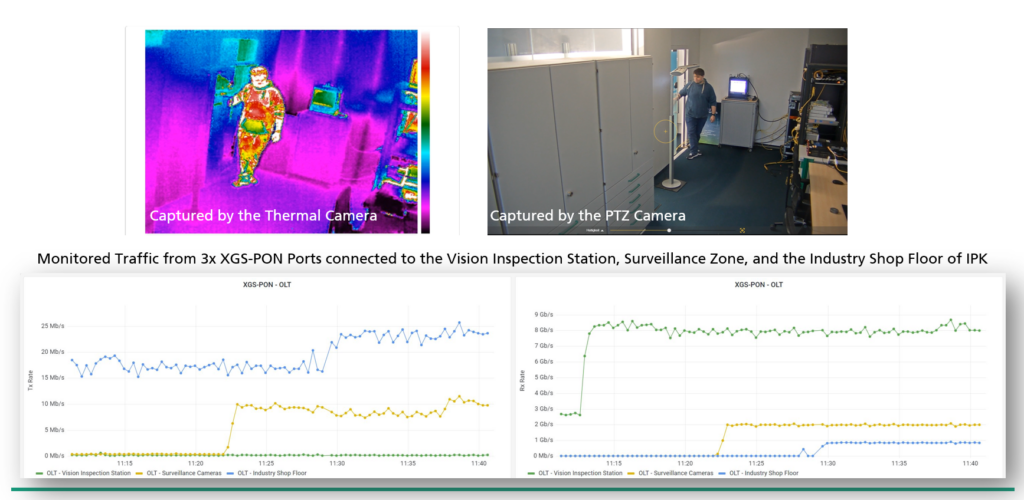
This PoC focused on multi-service capability of PONs. The demonstration showcases the multi-service capability by leveraging network slicing feature defined in the ETSI ISG F5G specifications. In the demonstration, three different services with different QoS requirements based on two manufacturing use-cases and one video surveillance scenario have been considered. The manufacturing use-cases are cloud-based control […]
Cloud-based Control of AGVs and Robots
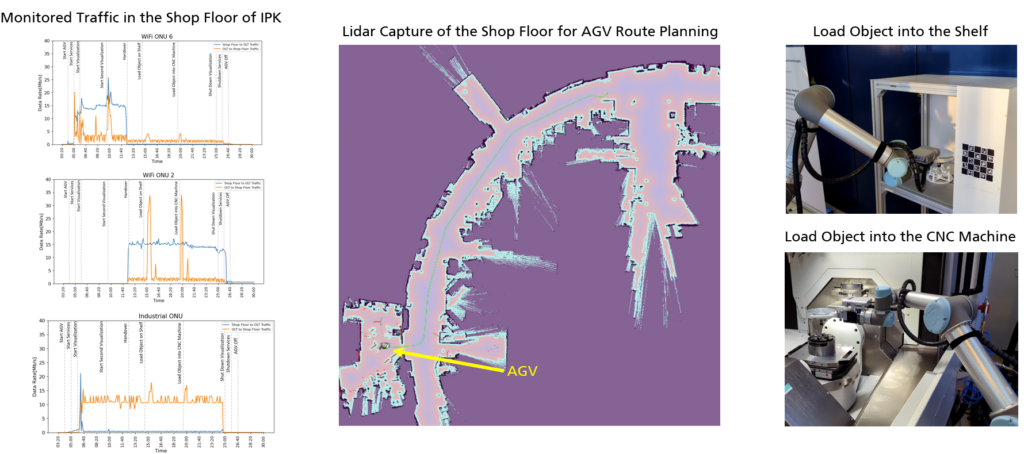
The Proof of Concept (PoC) successfully achieved several important objectives, demonstrating the capabilities of edge/cloud-based control systems: AGV Control Loop: The PoC effectively showcased a real-time control loop for Automated Guided Vehicles (AGVs), with the control software residing on an edge cloud. This setup enables remote operation of AGVs from a factory shop floor. Integration […]